燃料电池车辆主要为混合动力车型,除了搭载燃料电池堆外,还集成了额外的动力源,例如高压动力电池或超级电容器。有时会采用双向DC/DC变换器,以确保动力电池的电压与燃料电池堆的电压匹配。这一动力源的存在旨在为车辆提供额外电力,满足各种辅助负载、系统启动以及在燃料电池堆无法提供所需功率时的高功率需求。
01
存在问题
燃料电池堆通过直流高压母线为车辆提供运行所需的电力。而在功率需求超过电堆能力的情况下,例如瞬间快速加速时,动力电池则向高压母线提供额外电力。例如,燃料电池堆可以提供70kW的功率,但在车辆需要100kW的功率进行加速时,动力电池便发挥作用。在燃料电池堆足以满足系统功率需求的情况下,电堆也被用于为动力电池或超级电容器充电。此外,车辆在再生制动期间,由驱动电机产生的发电功率也可用于为动力电池或超级电容器充电。
在燃料电池混合动力车辆中,必须采用一套控制算法来确定燃料电池堆和动力电池在各种驾驶功率需求和车辆运行状况下分别提供多少功率。通过优化这两个电源的功率分配,旨在最小化氢气的消耗。换言之,目标是以最高效的方式操作燃料电池系统,从而使车辆在使用最少氢气的情况下能够行驶最远的距离。对于动力电池而言,其必须在定义好的充电状态(SOC)范围内运行。通常,控制算法会提供SOC设定点,根据该设定点来控制动力电池的充电和放电过程。
当车辆的燃料电池系统处于怠速模式(idle mode)时,例如在停车等红灯时,通常仍然向燃料电池堆供应空气和氢气,以维持电堆产生输出功率的状态。这一功率通常被用于充电动力电池,直到动力电池达到上限SOC。当SOC限制达到时,将电堆输出与动力电池充电断开,这会提高电堆电压,从而引发可能降低电堆寿命的一些现象。此外,在燃料电池堆处于怠速模式时提供氢气进行化学反应通常是不经济的,因为在这种条件下操作电堆几乎不会产生多少有用的功。
02
专利方案
本专利提出了一种将燃料电池系统置于待机模式(stand-by mode)的系统和方法。该方法包括基于燃料电池堆和动力电池功率优化确定功率限制值,如果系统功率请求低于功率限制值,则系统将进入待机模式。在功率请求低于功率限制值时,系统首先进入动态待机模式。在此模式中,燃料电池堆被关闭,空压机以自身怠速运行。该方法对空压机在动态待机模式期间以怠速运行消耗的功率进行累积计算。当累积的空压机功率值达到重新启动空压机所需的能量值时,系统切换到静态待机模式。在静态待机模式中,空压机被关闭。
图1展示了一个简化的燃料电池系统框图。当一些特定要求和标准得到满足时,燃料电池系统便能够进入待机模式。这些进入标准可能包括动力电池的SOC、驾驶员的功率请求、以及点火钥匙的位置等。

图1. 一个简化的燃料电池系统框图
如果控制器确定应该进入待机模式,其首先将燃料电池系统操作在动态待机模式下。在这个模式下,空压机保持在旁通阀打开的位置工作,而背压阀关闭。在动态待机模式中,空压机以其自身的怠速转速运行,例如30,000 RPM,但燃料电池堆被关闭。由于重新启动空压机需要大量的加速能量,因此在待机模式启动后的一段时间内,将空压机保持在其怠速转速下更为高效。换句话说,如果在进入待机模式时关闭空压机,然后在短时间内结束待机模式,重新启动空压机所需的功率将大于在待机模式开始时关闭空压机所节省的功率。
根据空压机的转速和空压机的类型等参数,可以进行计算以确定在何时关闭空压机,即保持空压机运行所需的能量是否超过在待机模式期间节省的能量。当关闭空压机时,待机模式事件从动态待机模式转变为静态待机模式,此时燃料电池堆和空压机均被关闭。
通过在动态待机模式中运行空压机,当有功率请求时,空压机能够从怠速转速迅速加速到所需速度。此外,以其怠速速度运行压缩机是有益的,因为对于那些采用气浮轴承的空压机,每次空压机速度降至零时,轴承上会产生摩擦,降低空压机寿命。
图2展示了一个时间-功率/能量的图表,横轴表示时间,纵轴表示功率和能量,呈现了上述待机模式中讨论的功率关系。线50表示来自燃料电池系统的功率请求,例如由混合动力优化器提出的请求。线52表示一个功率限制值,该值确定了在怠速状态下应关闭燃料电池系统的功率水平,进一步的动力电池充电在这种情况下既不可取也不可行。
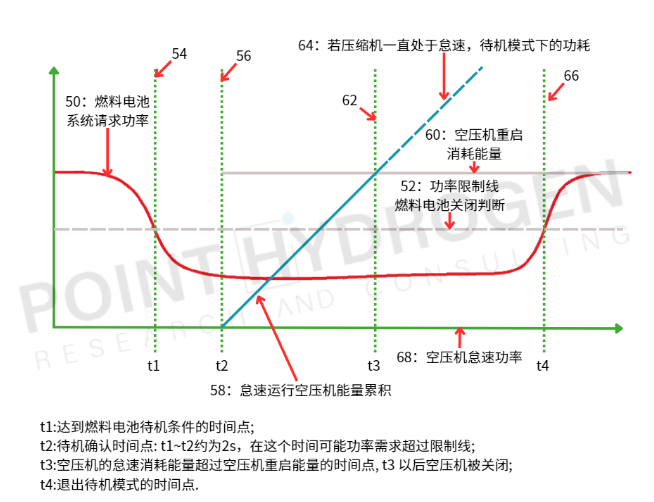
图2. 燃料电池系统待机模式中的功率关系
此外,当燃料电池堆关闭时,由于空压机在运转,动力电池功率被用于驱动空压机,导致能量的消耗。由于在待机模式期间动力电池功率被用于操作空压机,因此在关闭电堆时,有必要确保动力电池的SOC高于预定的SOC限制,以防止在待机模式期间操作空压机和其他系统设备导致动力电池SOC降至最低SOC要求以下。线68表示操作空压机以其怠速速度运行所需的功率,线60表示重新启动空压机从零速度到怠速速度所需的加速能量。线58表示随时间累积以满足以其怠速速度运行空压机所需的能量的功率。
当功率请求开始下降,表明可能存在待机模式条件时,功率请求最终将在时间t1处达到功率线52,由线54表示,此时控制器将启动待机模式。控制器在待机模式条件满足后允许一定的时间延迟,以提供稳定功率请求并消除功率请求立即返回超过功率限制线52的可能性,通常这个时间为1-2秒。一旦经过了这段时间,在时间t2处由线56表示,控制器然后通过首先在动态待机模式中操作,在该模式中,空压机继续以其怠速旋转速度运行,明确进入待机模式。
当燃料电池系统在动态待机模式中运行时,最终由空压机以其怠速速度旋转所消耗的能量将在时间t3处达到空压机重新启动加速能量,由线62表示。在此时,空压机以其旋转所需的能量等于在时间t2时关闭时重新启动空压机所需的能量。在时间t3,控制器进入静态待机模式,在此模式中,在待机模式的其余时间内关闭了空压机。
最终,当驾驶员退出怠速状态时,功率请求将增加。当功率请求在时间t4处达到功率限制线52时,由线66表示,待机模式将结束,并且混合动力优化控制将接管。通过以这种方式在动态待机模式和静态待机模式中操作空压机,通过线56、空压机能量线58和空压机重新启动能量线60围成的三角形表示的能量是所节省的能量。线64是线58的延伸,显示了在没有关闭的情况下,在静态待机模式期间空压机将使用多少能量。